Saugroboter SP-ROBO-001 von SupportPlus
![]() 13.02.2005
13.02.2005
Detailphotos vom Saugmechanismus
Videos:
 Wandkehrmodus (500kB) |
 Spiralfahrt (154kB) |
Bedienung:
Hauptschalter ein. Die Reinigungszeit wird mit den drei Tasten Large, Medium, Small bestimmt, so teilt man ihm die Raumgröße (30,15 oder 10m2) mit, und los gehts.
Allerdings könnte die Laufzeit der einzelnen Programme etwas länger sein: L = 20min, M = 15min, S = 10min. (Vielleicht muss ich ihm doch sein Eprom auslesen und das Programm patchen)
Abhängig von der gewählten Raumgröße verändert der Roboter dabei auch die Zeit die er geradeaus fährt bevor er noch vor der nächsten Wandberührung selbstständig eine Richtungsänderung vornimmt. Neben der normalen zufälligen Zick-Zack-Fahrt beherrscht der Robo-001 noch zwei Spezialmodi:Wandkehrprogramm:
Hierbei tastet sich der Roboter, in einer Art Schwänzeltanz, an der rechts von ihm befindlichen Wand entlang. Er kehrt dabei, unterstützt durch seine Seitenbürste, den Schmutz recht gründlich in seinen Bauch. Allerdings schein er dabei nicht von der Möglichkeit Gebrauch zu machen die Winkelsummen der Ecken zu berechnen und so hab ich ihn schon mal bei einer endlosen Tischbeinreinigung erwischt (Video 705kB)Spiralfahrt:
Dieser Modus ist ebenfalls recht nützlich. Bei Programmstart sollte man den Robo mittig im Raum platzieren da er zu Beginn gleich mit einer spiralförmigen Fahrt beginnt. Die Überdeckung der abgefahrenen Strecke ist hier 100%ig und somit ist das Reinigungsergebnis dementsprechend gut. Nach einiger Zeit im Zick-Zack-Programm verfällt er auch immer wieder in diesen Modus und zirkelt so seine Spiralen zufällig in den Raum.Programmende:
Sein Reinigungsprogramm beendet er entweder nach der eingestellten Zeit/Raumgröße oder wenn der Akku leer ist. Wobei er ihn nicht leerlutscht sondern kontrolliert vorher abschaltet.
Die versprochene Laufzeit von 90min auf glatten Böden und 60min auf Teppich wird aber bei weitem nicht erreicht. Nach ca.50min auf Fliesenbelag ist Schluss.Fazit:
Wir setzen ihn hauptsächlich auf gefliesten Böden ein wo er spätestens alle 2 Tage einen wirklich guten Job erledigt.
Auch auf Teppich leistet er erstaunliches, allerdings muss sich hier die Rotationsbürste schon hörbar abmühen, da die Reibung mit dem Teppich einfach höher ist.
Die subjektive Kontrolle des Saugergebnisses zeigt bei Hartböden ein sehr gutes Ergebnis bei Teppichböden ist das naturgemäß nicht ganz so einfach zu beurteilen.
Für die Nachtarbeit ist er allerdings nur bedingt geeignet da er doch ziemlich geräuschvoll zu Werke geht.


Saugbot von unten

Hauptbürste + Saugkanal (Abdeckung geöffnet)

Akku 14,4V NiMh 2800mAh (servicefreundlich mit Stecker)

Randkehrbürste.
In der Stoßstange kann man einen von vier Absturzsensoren erkennen.

....sehr aufwendiges Innenleben
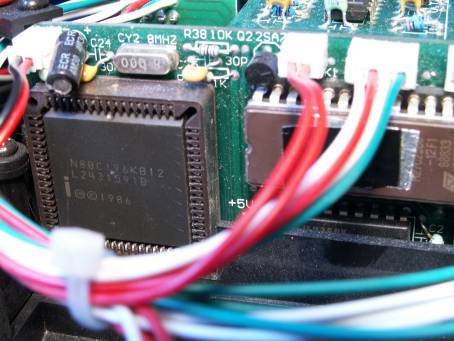
Ein gesockelter 80C196-Prozessor @8Mhz (wird der überhaupt noch produziert?)
und ein 32K Eprom. Da könnte man wirklich den Code auslesen und disassemblieren... wenn man das möchte...

2-fach Motorendstufe mit L298 für die beiden Antriebsmotoren. (Standard anno 1980)
Der andere FET ist für die restlichen Motoren (Bürste, Randkehrer, Sauggebläse)
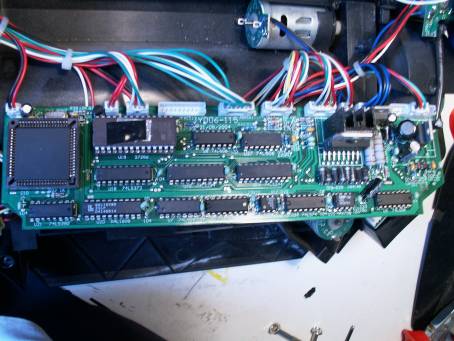
Die Hauptplatine... ein Standard-IC-Grab
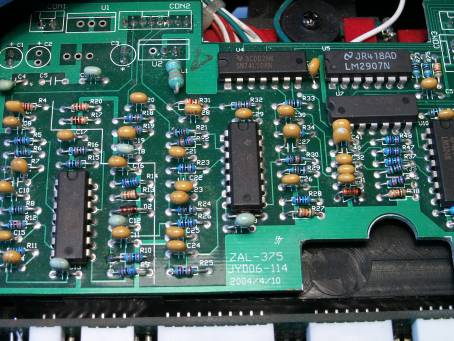
Die Sensorplatine... ein OP-Grab
Die Kollissionssenoren werden wie beim Roomba über Gabellichtschranken eingelesen.

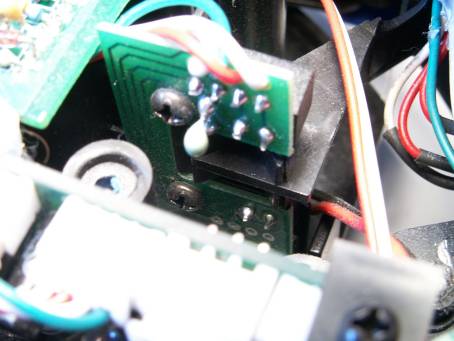
Einer der beiden Hauptantriebsmotoren. Links erkennt man die Anschlüsse für die Gabellichtschranke zur Positionskontrolle
Rechts unten der Taster für die Erkennung ob das Rad noch Bodenkontakt hat.
Ich hab das Getriebe noch nicht demontiert, sieht aber vermutlich genauso aus wie das vom Roomba: Planetengetriebe im Reifen und Riemenantrieb zur Motorwelle.
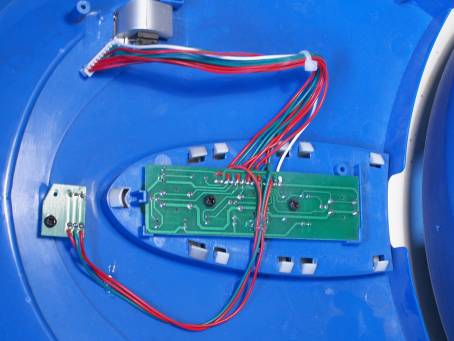
Das Bedienfeld - unspektakulär
3 Tasten 3 LEDs für die Raumgröße, und eine DuoLed für den Akkuzustand

Wand-entlang-kehr-Sensor

Ultraschall-Höhensensoren?!?
Zum Vergleich mit dem Roomba-Urmodell empfehle ich die Seiten von Jake Luck
oder diese Seiten mit einer Reparaturanleitung
... die Ähnlichkeit (der Mechanik) ist schon sehr verblüffend.
